南(nán)京乐鱼手机登录入口和斯沃(wò)软件技术(shù)有限公司(sī)开发的工业机器人仿真软件,该软件中机器人模型包括(kuò)了几(jǐ)种常见的品牌型号ABB IRB120、ABB IRB140、ABB IRB1410、ABB IRB1600;每(měi)个模型具有不同(tóng)的末端(duān)执行(háng)器工具(jù),工业机(jī)器人操作实(shí)验(yàn)可以进(jìn)行机器人的滚动、俯仰、偏(piān)转(zhuǎn)等,使用者(zhě)可以用(yòng)关节模式和直角(jiǎo)坐标系模式来移动机器(qì)人模型,可(kě)以参照(zhào)和显示TOOL坐标系、BASE坐(zuò)标系、WORLD坐(zuò)标系等。该(gāi)软件真实感强,模型为目(mù)前工业机器人主流模型,效(xiào)果逼真。使用者在(zài)PC机(jī)上模拟操作工业机器(qì)人(rén),能够(gòu)短时间内掌握多种模(mó)型机器人(rén)的基本操作。
1、机(jī)器(qì)人模型支(zhī)持6轴串(chuàn)联
2、机器人模型支持多种(zhǒng)末端执行器工具(jù)
3、工(gōng)具栏:显示面板、重新设定(dìng)、连续(xù)播放所有步骤、视点重(chóng)置、旋转、缩放、平移
4、支持模型(xíng)透明度设(shè)置、视角(jiǎo)变换速度设(shè)置、矩阵显示
5、用关节模式(shì)来移动机(jī)器人模型支持手动线性(xìng)、手动平面、手动旋转三种方式
6、支持联动虚拟操(cāo)作:可设定轴角(jiǎo)度、零度复(fù)位
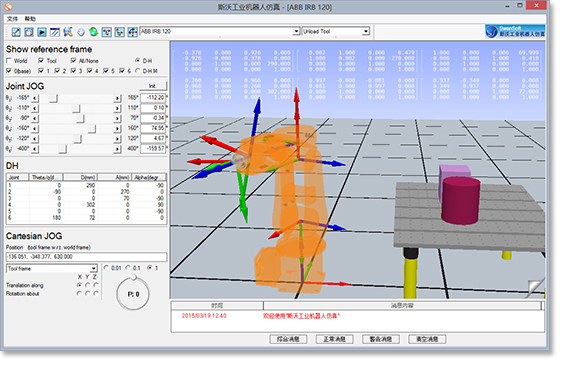
7、支持机器(qì)人欧拉角DH参(cān)数显示
8、支(zhī)持(chí)笛卡尔坐标系坐标显示
9、手动支持沿XYZ坐标轴移动或绕XYZ坐(zuò)标轴(zhóu)旋(xuán)转且倍率(lǜ)可调(diào)
10、支持综合消息、正常消息、警告消息的(de)提示以及清除消息的操作
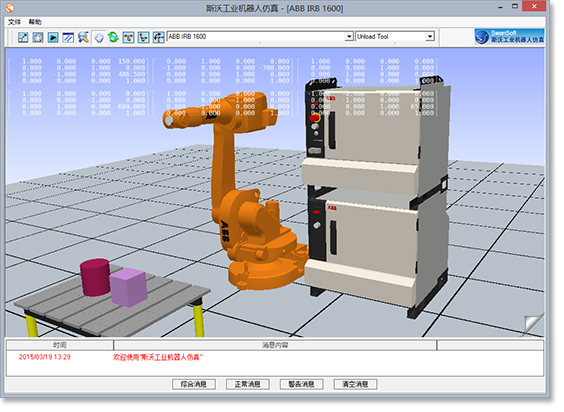
软件主(zhǔ)界面

手(shǒu)动线(xiàn)性移动
手动平面移动(dòng)

手动旋转

矩阵显示

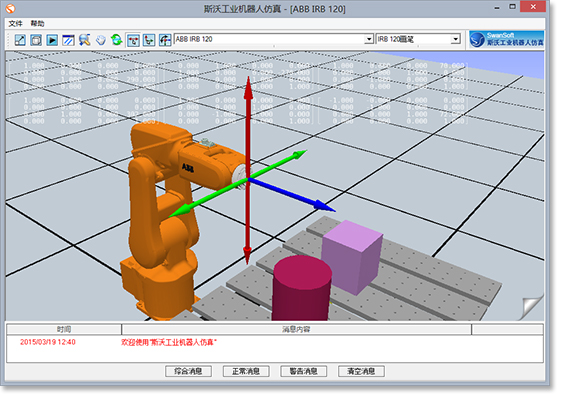
TOOL坐标系、BASE坐(zuò)标(biāo)系、WORLD坐标系

模(mó)型透明(míng)度设置
双柜控制台